

- BUSINESS
- 스마트 모빌리티
SMART MOBILITY
스마트 모빌리티

- 오픈 모빌리티 플랫폼
Open mobility platform
오픈 모빌리티 플랫폼

Chameleon
오프로드 주행이 가능한 다목적 4륜조향,
4륜구동 모빌리티 플랫폼
Chameleon™은 다양한 지형조건에서 다양한 형식의 주행을 구현할 수 있는 고객들의 요구조건을 만족시키기 위한 소형 E-모빌리티 플랫폼입니다.
수년간의 자율주행 모빌리티 개발경험이 녹아든 우수한 주행성을 확보하기 위한 저중심 설계 기반의 4륜조향 4륜 구동 시스템을 적용하고 있으며 다양한 어플리케이션을 상부에 적용할 수 있도록 고려된 제품입니다.
Spec
규격
전장 1M / 전폭 0.8M / 전고 0.5M
중량
공차중량 40kg / 최대적재하중 25 kg / Aluminum Body 적용
속도
Max 10kph (Option : > 20kph)
최대주행거리
20km
조향
Ackerman 기반 4륜조향 / Max Steer Angle < 30°
(Option : 4륜 독립 조향)
(Option : 4륜 독립 조향)
타이어
기본 / Hard Type / 지름 250mm x 폭 75mm
(Option / Soft Type : 지름 265mm * 폭 85mm)
(Option / Soft Type : 지름 265mm * 폭 85mm)
구동모터
기본 400W (옵션 750 W, 1kW)
현가
멀티링크형 (차고 조절 기능 탑재 : 2단계)
전원
배터리 (리튬이온, 24V / 1kW)
제어기(VCU) 사양
ARM PROCESSOR / STM32 / CAN 2.0B 지원
리모트 컨트롤러(2.4GHz), 완속충전기 지원 (완충소요시간 : 6hr)
옵션 사양
추가 차고 조절을 위한 스프링
주요 특징
(option)

CAN 통신
기반 전용 VCU
기반 전용 VCU

차고조절
기능적용
기능적용
전후륜
디퍼렌셜 적용
디퍼렌셜 적용

CAN 통신
기반 전용 VCU
기반 전용 VCU

차고조절
기능적용
기능적용

전후륜
디퍼렌셜 적용
디퍼렌셜 적용
Key Point

안정적인
오프로드 주행
오프로드 주행

4륜조향
4륜구동
4륜구동

다양한 목적으로
활용가능
활용가능
* Chameleon은 기본 공급 사양 외에 고객의 다양한 니드에 따라 맞춤 제작을 지원합니다.
고객 맞춤형
제작 지원

교육용,연구용 플랫폼

경비용 모빌리티

Logistic Robot

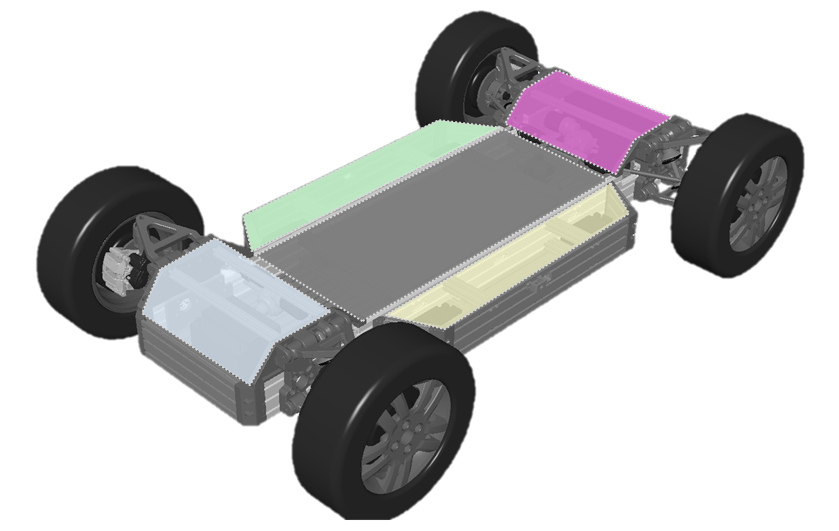
Vega
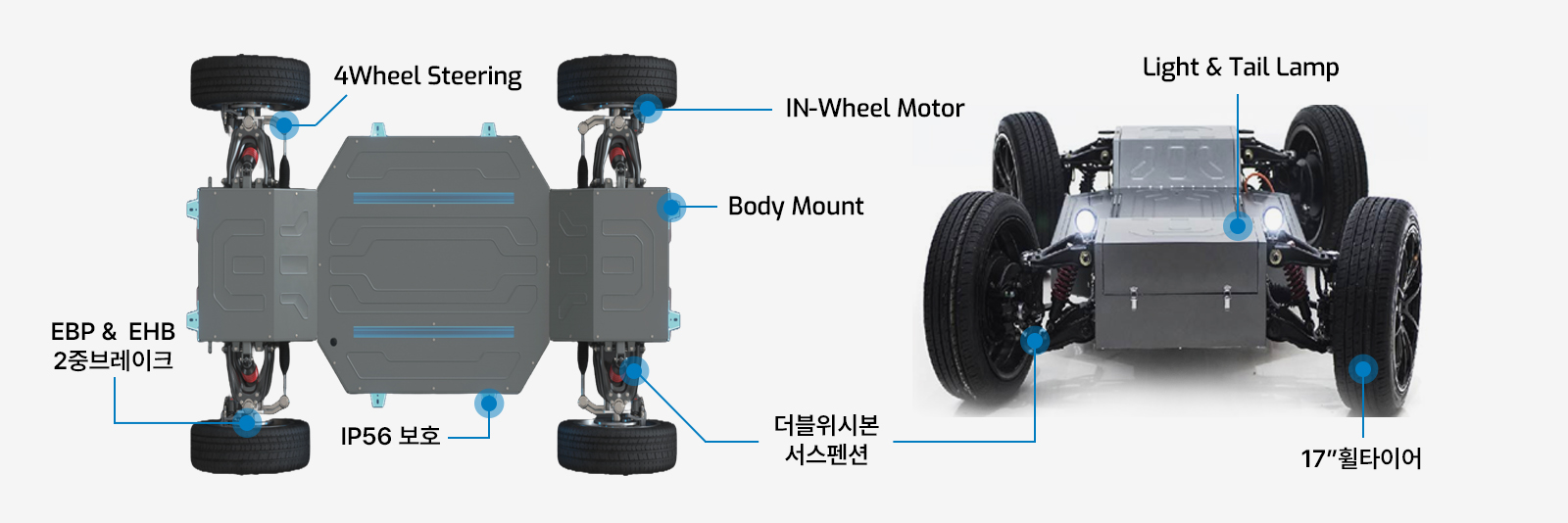
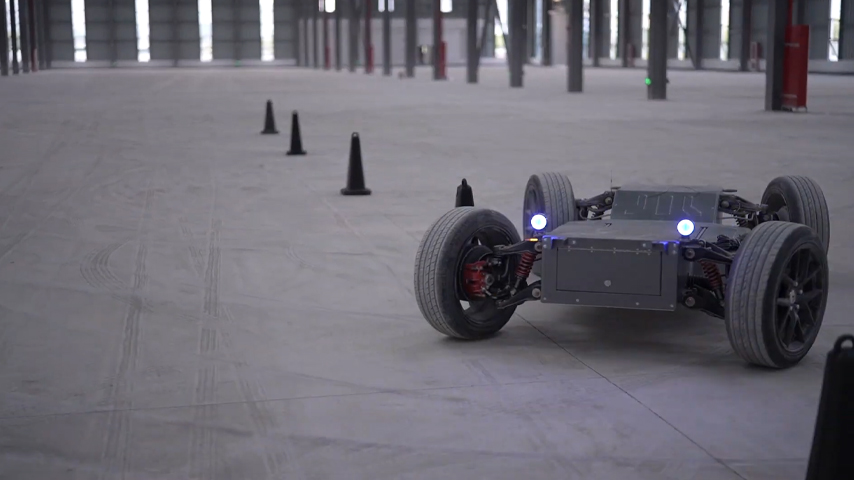
실차 사이즈의 자율주행 개발을 위해 최적화된 EV 모빌리티
플랫폼 Full-Drive-by-Wire Skateboard Chassis Platform
- 인휠 모터 / 다양한 조향 모드 (2WD, 4WD, 독립제어 4WD)
- 맞춤/확장 제작 가능한 다목적 자율주행 플랫폼
- 오픈 CAN 인터페이스 / 오픈소스 SW (Autoware) 지원
- 안전 장치 기능 포함
Spec
전장-전폭-전고
2,500 x 1,700 x 630mm
최대 적재 능력
500kg (1,000kg)
최대 주행거리
80km
배터리
11kW · 72V (국산 인증)
충전시간 (완속)
6H
조향
Ackerman 4륜
CAN 통신
CAN 2.0b
최대 속도
40km/h
정격 출력
12kW (4 x 3kW)
최대 토크
720 N.m
조향 각도
좌우 30°
내부전원공급
72V, 24V, 12V
브레이크
EPB 전자 브레이크
방수 등급
IP56
제품 기본 구성

전동형 샤시모듈 x 1

리모트 컨트롤러 x 1

충전기 x 1
옵션
스페이스 프레임

센서 마운트
라이다/레이더/카메라 등
(맞춤 제작 지원)

드라이빙 키트
- 스티어링 휠
- 엑셀, 브레이크 페달
- 조작용 IO 박스
- 드라이빙 시트

범퍼
- 앞, 뒤 범퍼 1식
- 충돌 감지 센서 내장형
패키지

OPERA-KIT

OPERA-GoCart
맞춤/확장
모빌리티
제작 지원
고객의 요구와 목적에 최적화된 맞춤형 제작,다양한 옵션으로 최고의 자율주행 솔루션을 제공합니다.

4인승 Shuttle 차량

물류 차량

Steering Controller
- 4 Wheel Steering 제어
- 12V DC 전원 공급 장치
- 1개의 DC 모터 드라이브
- CAN 인터페이스

Battery Management System
- 전압/전력/온도 출력
- 충전 인터페이스
- 배터리 보호 로직 有 (과충전/과전류/전압불균형)
- CAN 인터페이스
DC Power System
- 허브 모터 전력 분배
- 샤시/바디/자율주행 모듈 전원공급

Hub Motor Drive
- 허브 모터 구동 회로 모듈
- 입력 전압 72V DC / 3상
- 허브 모터 연결
- CAN 인터페이스 제공

Vehicle Control Unit
- 구동 제어
- 제동 제어
- 조향 제어

수동 제어용 리모트 컨트롤러
- 운영자 탑승시 차량 조작용 컨트롤러
- X-by Wire 시스템 활용으로 외부에서도 차량 조작 가능

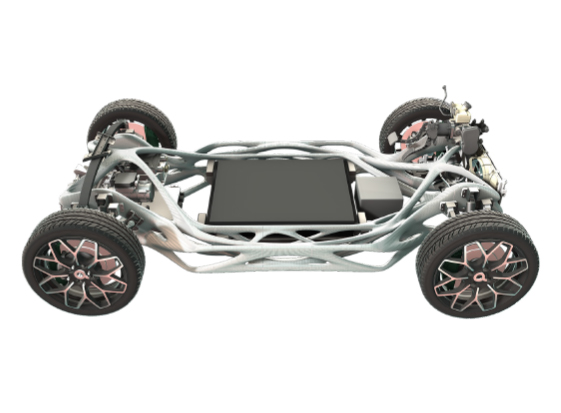
Leo P1
초소형 모빌리티 규격의 EV Chassis Platform
- 초소형(1~2인승) 기준 EV 플랫폼
- 가벼운 차체 및 뛰어난 주행거리
- 더블 위스본 서스펜션 적용으로 우수한 승차감 지원
- 전륜 조향, 후륜 구동 타입
- 일체형 (3D 프린팅) 프레임 적용
- 수동 운전 + Drive By Wire 기능 동시 탑재
Spec
전장-전폭-전고
2,610 x 1,455 x 978mm
최대 적재 능력
350kg
최대 주행거리
150km
배터리
14.6kW · 144V
프레임 소재
알루미늄 합금
최소 회전 반경
3.2m
최대 속도
95km/h (SW 제한 80km/h)
정격 출력
15kW
최대 토크
600 N.m
조향 각도
좌우 30°
타이어
165/65 R15
브레이크
EPB 전자 브레이크

Leo P6
오픈 모빌리티 플랫폼과 Level4 자율주행 기술을 적용한 자율주행 셔틀형 모빌리티
- 셔틀/택시 서비스에 최적화 된 차량 디자인 적용
- 자율주행 Level 4 기술 탑재
- 맵핑부터 실제 서비스까지 2~3일 이내 구현
- 다양한 실증 사례를 통한 안전한 운행기술 탑재
- 안락한 내부 공간 (승차정원 : 6명)
- 사륜구동,사륜조향 시스템 적용
- 모듈러 디자인 적용으로 유지보수의 편의성 확보
- 다중 안전 시스템 적용
Spec

전장-전폭-전고
3,810 x 1,960 x 2,220mm
내부 높이
1,780mm
좌석 높이
430mm
바닥 높이
368mm
배터리
21.5kW
충전시간(급속, 완속)
1.5H – 5H
구동 모터
영구 자석 모터
탑승 인원
6명
최대 주행거리
100km
최대 속도
30km/h
정격 출력
12kW (4x3kW)
정격 토크
38.2N.m
최소 회전 반경
4.5m
구동 방향
양방향 주행 가능
* Robobus는 다양한 센서 패키지(LiDAR, 카메라, 내비게이션 시스템 등)와 다층 안전 중복 시스템을 갖추고 있어 안전하고 효율적인 자율주행을 제공합니다.
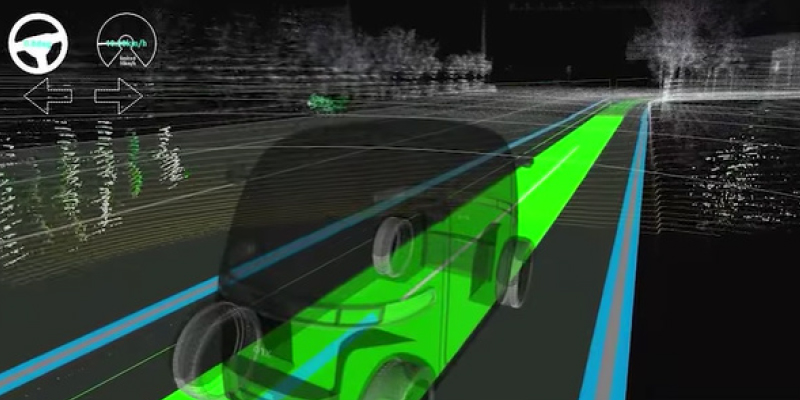
자율주행
Robobus에 탑재된 자율주행 소프트웨어는 전 세계적으로 인정받고 있는 오픈소스기반 자율주행차 SW 플랫폼인 Autoware Universe입니다.
Autoware를 이용하여 로보버스에 설치된 카메라, 라이다, INS 등의 다양한 센서를 통한 주행상황(장애물,차선도로 표시 및 교통 신호등, 등)을 인식하여 안전한 자율주행을 구현하였습니다.
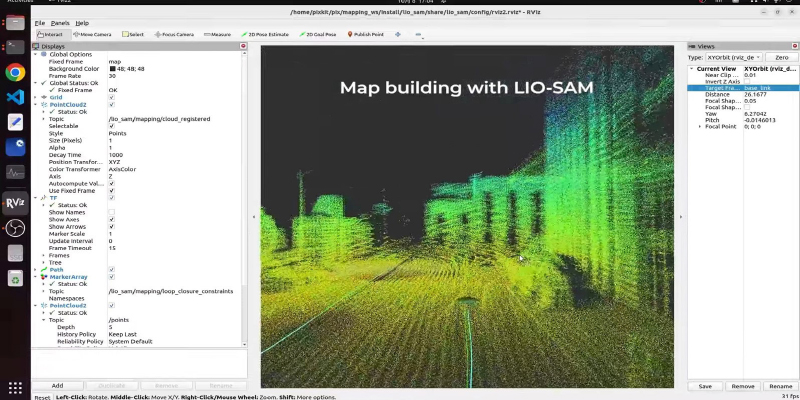 하루만에 가능한 빠른 Mapping 기술 적용
하루만에 가능한 빠른 Mapping 기술 적용
 도로상 객체 인식 및 경로 설계/추종 기술 적용
도로상 객체 인식 및 경로 설계/추종 기술 적용
활용사례
오피스, 이동형 Shop, 브랜드 홍보 공간으로 적합
수려한 외관을 가진 Robobus는 자율주행, 원격주행 등의 효율적인 기술을 활용하여 다양한 용도로 활용이 가능합니다.
오피스로 활용할 수 있으며, 제품을 판매하거나 홍보할 수 있는 편집샵, 푸드트럭, 브랜드 홍보관 등 이동형 샵으로 고객에게 더 가까이 다가갈 수 있습니다.






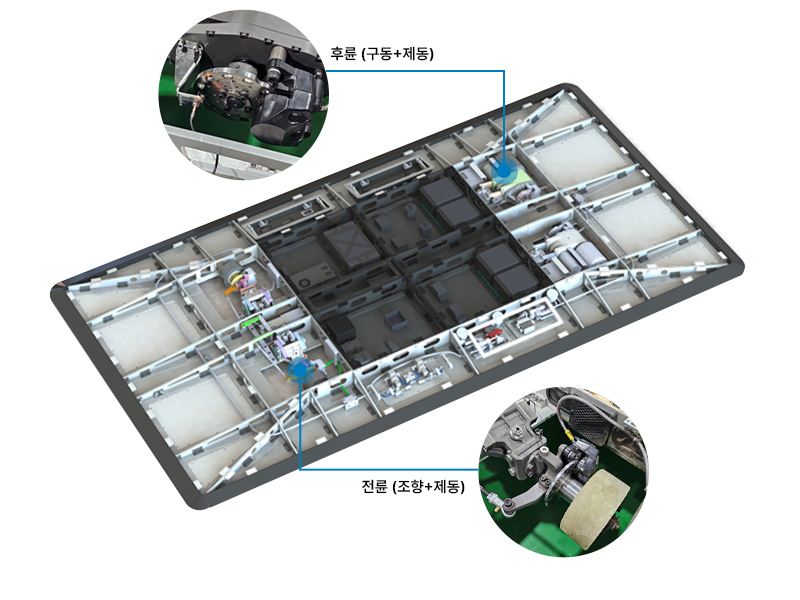
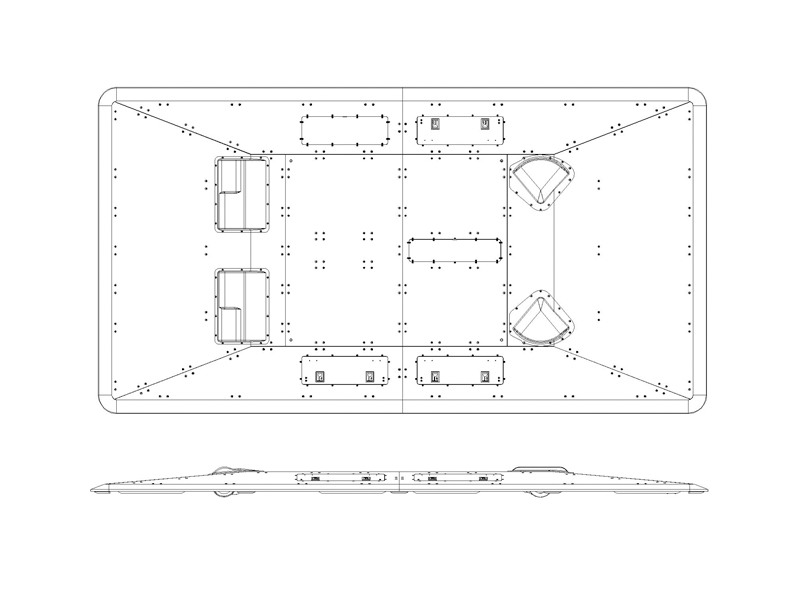
Scorpius™
자율주행 / ADAS 성능 및 안전성 검증용
자동 주행형 더미 로봇 플랫폼
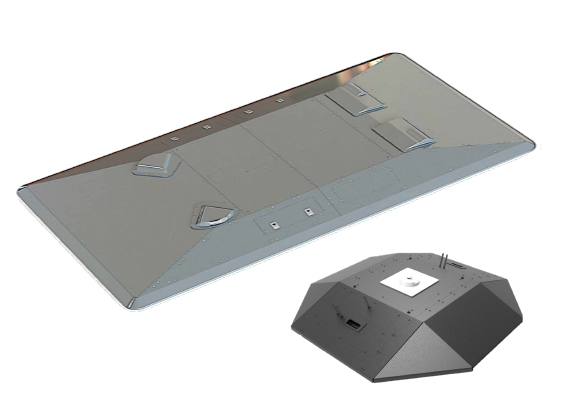
OFR은 목표 자동차 (Target Vehicle) 또는 목표 보행자 (Target Pedestrian) 모형을 상부에 설치하여 설정된 시나리오에 따라 이동할 수 있는 AGV(Automated Guide Vehicle) 로봇 플랫폼 입니다.
OFR은 대상자동차(Ego)와 목표 (Target)가 충돌했을 때 대상 자동차가 안전하게 목표 상부로 통과할 수 있도록 하는 기능을 가지고 있습니다. 이 기능으로 대상자동차의 반복적인 정량적인 시험이 가능하게 됩니다. 해당 기능을 위해 특수하게 설계된 구동/현가/제동 장치를 탑재하고 있으며 목표 자동차의 경우 최고속도 80kph 에 이르는 성능을 가지고 있습니다.
Spec
| OFR_Vehicle | OFR-Pedestrian/Bike | |
|---|---|---|
| Dimensions | 3,170 x 1,690 x 100 | 1,000 x 1,000 x 100 (85) |
| Clearance | < 40 mm (Adjustable) | > 40 mm |
| Weight | 275 kg | 80 kg |
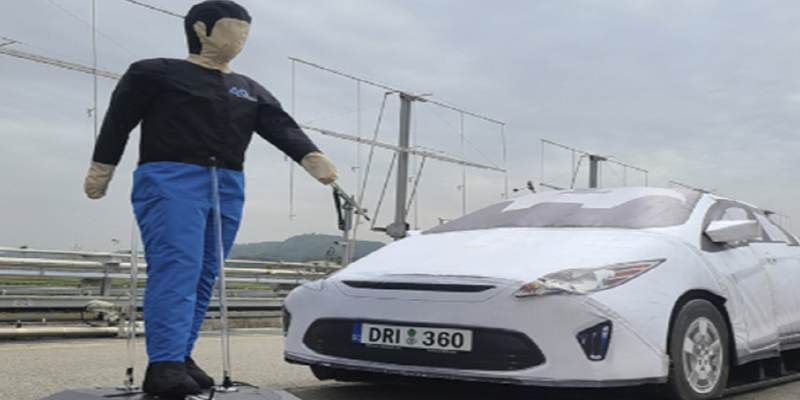
| Payload | 120 kg (DRITM Soft Car 360) | 30 kg (Soft Pedestrian Target) |
| Speed | 80 km/h | 10(40) km/h |
| Acceleration | 3 m/s2 | 1(3) m/s2 |
| Braking | -8 m/s2 (Hydraulics) | -8 m/s2 |
| Control Modes | Waypoint & Manual(W/ Joystick) | ← |
| Network | LTE, WIFI, RF-Radio(Remote Controller) | ← |
| ETC | 교체형 배터리, 에어서스펜션, 관제실 통합제어 | ← |
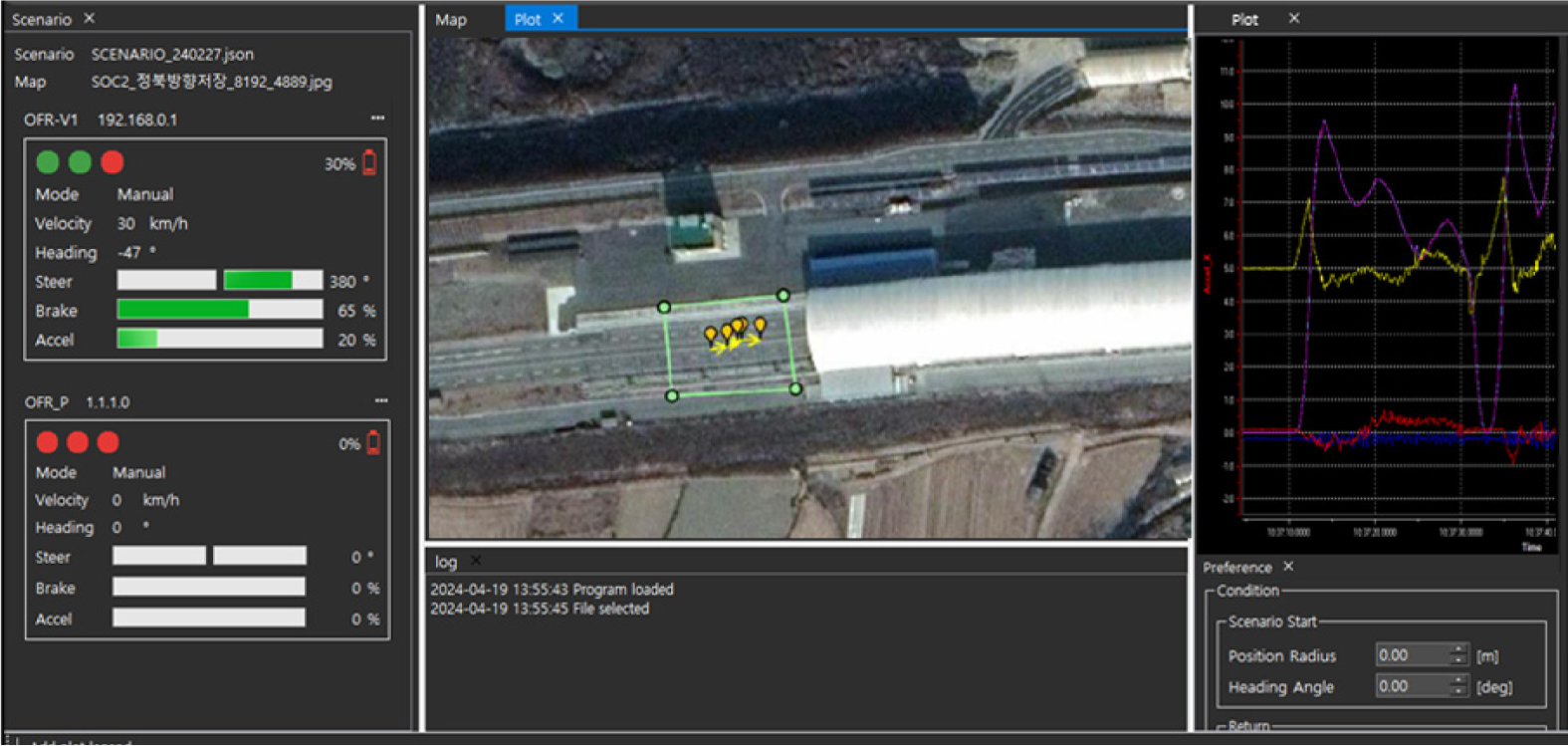
Managing SW
for Multi-OFR
-
시나리오 설계/편집
-
다개체 동기화 지원
-
로봇 상태데이터 모니터링/저장/분석 기능 내장


주요 특징
- 충돌/OVERRUN 보호 구조설계
- 차고조절 SUSPENSION
- 바디 부품 모듈화
- 위치 정밀도 0.05m 이내
- 속도 정밀도 0.05m/s
- 소형 저전력 제어보드
| OFR-V 상세 제원 | ||||
|---|---|---|---|---|
| 최대 속도 | 60km/h | |||
| 최대 가속도 | 0.3g | |||
| 최대 감속도 | 0.8g(마른 노면) | |||
| 최대 횡 가속도 | 0.3~0.4g | |||
| 무게 | 275kg | |||
| 길이 | 3170mm | |||
| 너비 | 1690mm | |||
| 높이 | 100mm | |||
| 휠 베이스 | 1620mm | |||
| 전 오버행 | 865mm | |||
| 후 오버행 | 685mm | |||
| 지상고 | 30mm | |||
| 주행 배터리 상세 제원 | 시스템 배터리 상세 제원 | ||
|---|---|---|---|
| 배터리 팩당 용량 / 총 용량 | 710.4Wh / 2.84kWh | 배터리 용량 | 1.55kWh |
| 배터리 팩 개수 | 4 | 배터리 개수 | 1 |
| 배터리 팩당 셀 | 12S | 배터리 팩당 셀 | 7S |
| 셀 공칭 전압 | 3.7V | 셀 공칭 전압 | 3.7 |
| 셀 최대 충전 전압 | 4.2V | 셀 최대 충전 전압 | 4.2 |
| 셀 공칭 용량 | 16Ah | 셀 공칭 용량 | 60Ah |
| 최대 연속 방전률 | 25C | 최대 연속 방전률 | – |
| 최대 연속 방전 전류 | 400A | 최대 연속 방전 전류 | 100A |
| 최대 연속 충전률 | 3~5C | 최대 연속 충전률 | – |
| 최대 연속 충전 전류(권장) | 80A(15A) | 최대 연속 충전 전류(권장) | 10A |
| 컷오프 방전 전압 | 3.3V | 컷오프 방전 전압 | 3.3V |


