
- BUSINESS
- 스마트 모빌리티
SMART MOBILITY
스마트 모빌리티
Open mobility platform
오픈 모빌리티 플랫폼

RMP 401
Segway 사의 소형 로봇/모빌리티 플랫폼
다양한 형태로 상부 형태 적용가능한 오픈형 구조 채택
단순 연구용 외에 실제 제품화가 가능한 수준의 플랫폼
- 4 Wheels Drive (Strong Power Output )
- Independent Suspension (Double-wishbone)
- Power-off brake & Kinetic energy recovery
- Battery Capacity : for 10 hrs
- Environment Level :








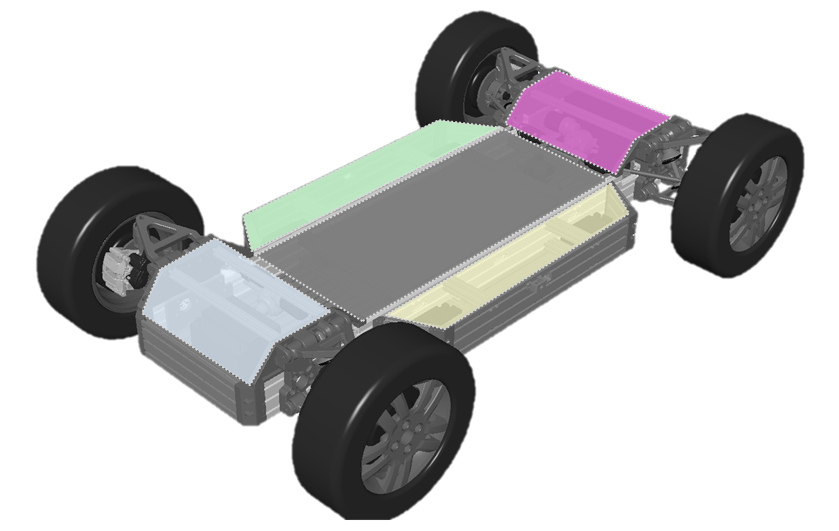
OPERA LOOP
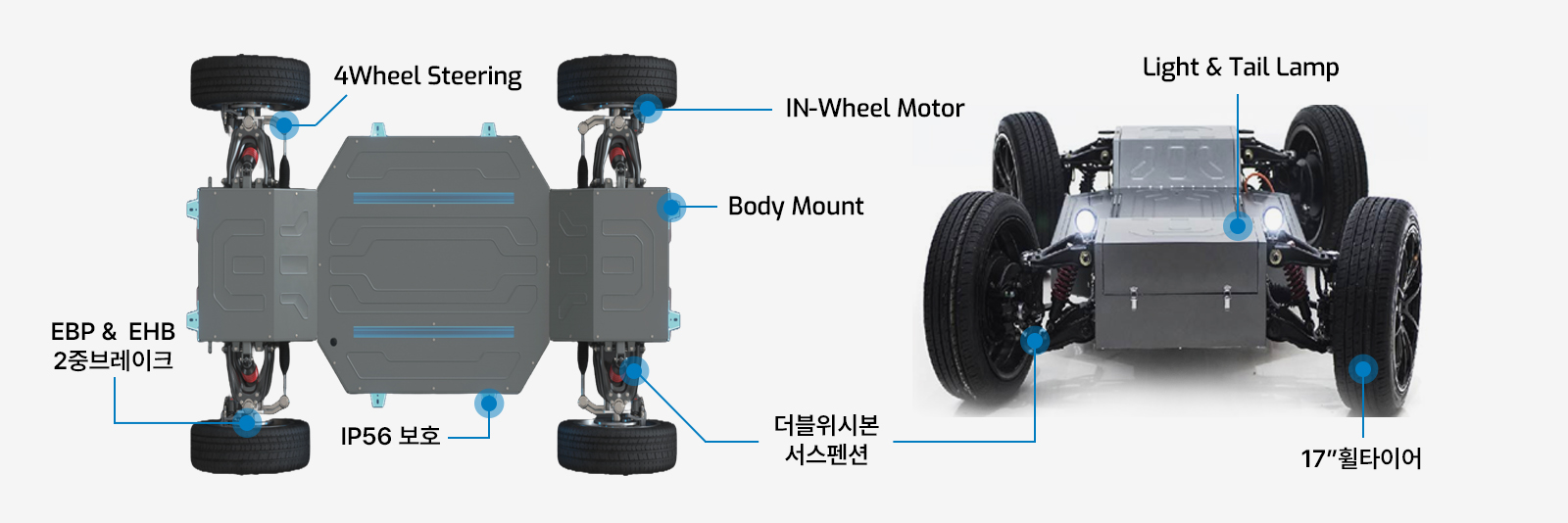
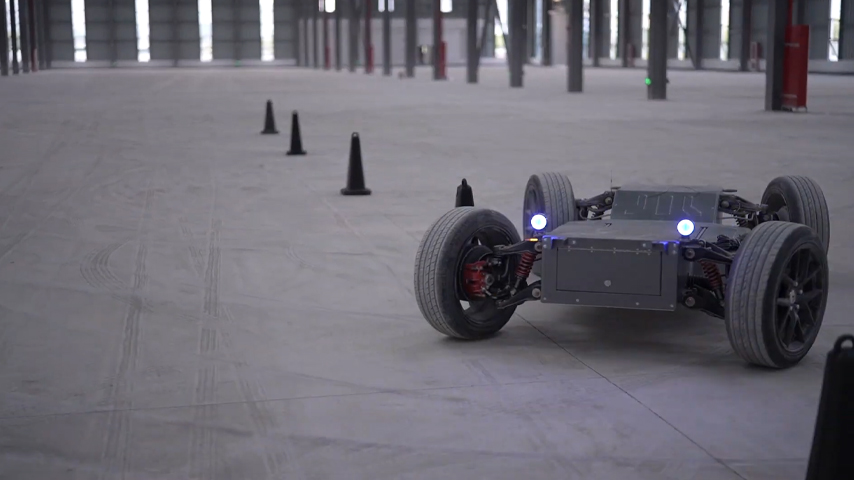
Drive by Wire 구동방식의 Open Type EV 플랫폼
- 목적 구조물 설치에 용이한 바디형 적용
- 경차 사이즈의 전장/전폭 적용
- 4륜 조향 (Ackerman) & 독립 현가(더블위시본)
- 4륜 구동 ( Inwheel Motor 적용)
- EPB 적용
- 오픈프로토콜 기반 제어 (CAN)
- 최대속도 : 40kph
- 최대 적재능력 : 500kg (1,000 kg)
- 국산 인증 배터리 탑재 (72V, 180A, 11kW)
- 최대 주행거리 (80km)

Steering Controller
- 4 Wheel Steering 제어
- 12V DC 전원 공급 장치
- 1개의 DC 모터 드라이브
- CAN 인터페이스

Battery Management System
- 전압/전력/온도 출력
- 충전 인터페이스
- 배터리 보호 로직 有 (과충전/과전류/전압불균형)
- CAN 인터페이스
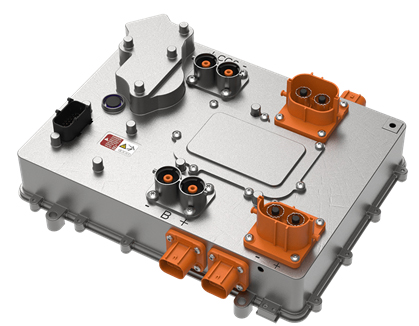
DC Power System
- 허브 모터 전력 분배
- 샤시/바디/자율주행 모듈 전원공급

Hub Motor Drive
- 허브 모터 구동 회로 모듈
- 입력 전압 72V DC / 3상
- 허브 모터 연결
- CAN 인터페이스 제공

Vehicle Control Unit
- 구동 제어
- 제동 제어
- 조향 제어

수동 제어용 리모트 컨트롤러
- 운영자 탑승시 차량 조작용 컨트롤러
- X-by Wire 시스템 활용으로 외부에서도 차량 조작 가능


OPERA KIT
오픈 소스 기반 자율주행 개발 및 교육 키트
OPERA KIT는 소형 차량 사이즈의 오픈 플랫폼인 Opera Loop 에
라이다, 카메라, 레이더, IMU, GNSS 수신기, 제어기를
추가하여 도입 후 별도의 하드웨어 추가 작업 없이
자율주행 개발을 시작할 수 있는 교육 또는 연구용 개발키트입니다.
자율주행 개발용 오픈소스 인 ROS 2, AUTOWARE 소프트웨어를
사용할 수 있도록 지원하며, 다양한 정보를 공유하고 개발을 도울 수
있는 공유환경을 제공합니다.




OPERA Driving KIT
OPERA Driving Kit 은 OPERA KIT 의 기능에 운전자가 직접 운전할 수 있는
조작장치를 탑재하여 다양한 용도로 차량을 활용할 수 있도록 한 플랫폼 입니다.
금속 3D프린터를 이용한 차체 프레임을 탑재하여 수려함과 함께, 센서 마운트의
자유도 및 안전사고시 안전을 확보하였습니다. 베이스 샤시 모듈 플랫폼인
OPERA LOOP 의 Drive-by-wire 기능을 활용할 수 있는 스티어, 페달 기능을 제공하여
필요시 쉽게 자율주행과 수동주행, 원격주행을 스위칭 할 수 있도록 개발되었습니다.




ROBOBUS
ROBOBUS는 오픈 샤시모듈 플랫폼을 기반으로 제작된 4~6인용 이동형 모빌리티로
어느곳에서도 어울리는 수려한 디자인과 편안한 탑승이 가능한 형태를 자랑합니다.
4륜조향 시스템을 탑재하여 전후방향 구분 없는 주행이 가능한 형태로
다양한 용도로 실내 구성을 적용하여 사용이 가능한 것이 특징입니다.
- L4 Autonomous Driving
- Bi-Directional
- For Multi-scenario Applications
- Innovative Design
- New Mobility Experience
- Configured Sensor Package
- High-performance Drive-by-Wire Capability

Range
70-100km
Maximum Gradeability
20%
Minimum Turning Radius
4.5 m
Floor Height
368 mm
Rated Power
4 X 3 kw
Rated Torque
4 X 9.55 N.m
Drive Motor
Permanent Magnet Motor
Fast Charge – Slow Charge
1.5 – 5h
Length/Width/Height
3810×1960×2220 mm
Internal Height
1780 mm
Seat Height
4 X 3 kw
Speed
15-30 km/h
Battery Capacity
21.5 kwh
Passengers
6 people
Maximum Payload
510 kg
Area Covered
7.4 m²








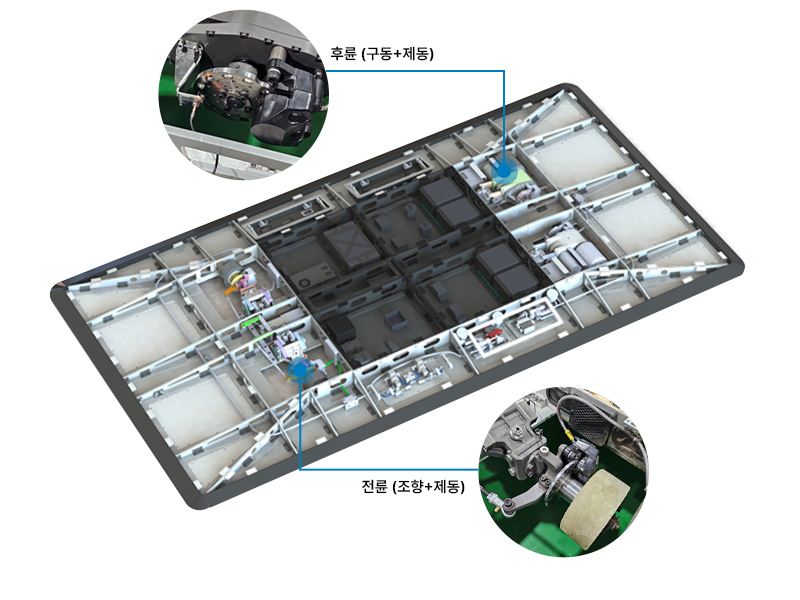
OFR
OFR 은 목표 자동차 (Target Vehicle) 또는 목표보행자 (Target Pedestrian) 모형을
상부에 설치하여 설정된 시나리오에 따라 이동할 수 있는 AGV (Automated Guide Vehicle) 로봇 플랫폼 입니다.
OFR은 대상자동차(Ego)와 목표 (Target)가 충돌했을 때 대상 자동차가 안전하게
목표 상부로 통과할 수 있도록 하는 기능을 가지고 있습니다.
이 기능으로 대상자동차의 반복적인 정량적인 시험이 가능하게 됩니다.
해당 기능을 위해 특수하게 설계된 구동/현가/제동 장치를 탑재하고
있으며 목표 자동차의 경우 최고속도 80kph 에 이르는 성능을 가지고 있습니다.
- 교체식 구동용 배터리, 주행제어시스템 배터리 분리
- 조절식 에어서스펜션 적용
- 충격감지 센서 적용
- LTE,WIFI,RF등 다양한 통신백업기능 적용
주요 특징
- 충돌/OVERRUN 보호 구조설계
- 차고조절 SUSPENSION
- 바디 부품 모듈화
- 위치 정밀도 0.05m 이내
- 속도 정밀도 0.05m/s
- 소형 저전력 제어보드
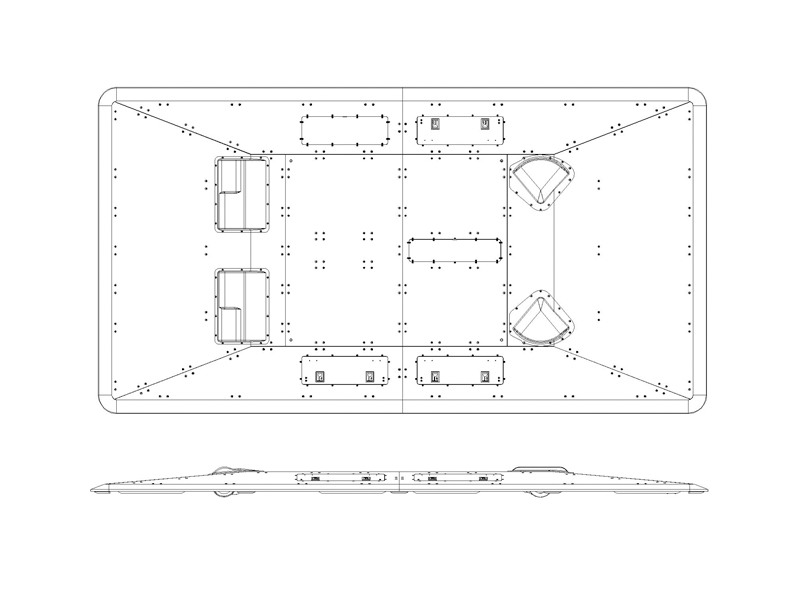
| OFR-V 상세 제원 | ||||
|---|---|---|---|---|
| 최대 속도 | 60km/h | |||
| 최대 가속도 | 0.3g | |||
| 최대 감속도 | 0.8g(마른 노면) | |||
| 최대 횡 가속도 | 0.3~0.4g | |||
| 무게 | 275kg | |||
| 길이 | 3170mm | |||
| 너비 | 1690mm | |||
| 높이 | 100mm | |||
| 휠 베이스 | 1620mm | |||
| 전 오버행 | 865mm | |||
| 후 오버행 | 685mm | |||
| 지상고 | 30mm | |||
| 주행 배터리 상세 제원 | 시스템 배터리 상세 제원 | ||
|---|---|---|---|
| 배터리 팩당 용량 / 총 용량 | 710.4Wh / 2.84kWh | 배터리 용량 | 1.55kWh |
| 배터리 팩 개수 | 4 | 배터리 개수 | 1 |
| 배터리 팩당 셀 | 12S | 배터리 팩당 셀 | 7S |
| 셀 공칭 전압 | 3.7V | 셀 공칭 전압 | 3.7 |
| 셀 최대 충전 전압 | 4.2V | 셀 최대 충전 전압 | 4.2 |
| 셀 공칭 용량 | 16Ah | 셀 공칭 용량 | 60Ah |
| 최대 연속 방전률 | 25C | 최대 연속 방전률 | – |
| 최대 연속 방전 전류 | 400A | 최대 연속 방전 전류 | 100A |
| 최대 연속 충전률 | 3~5C | 최대 연속 충전률 | – |
| 최대 연속 충전 전류(권장) | 80A(15A) | 최대 연속 충전 전류(권장) | 10A |
| 컷오프 방전 전압 | 3.3V | 컷오프 방전 전압 | 3.3V |




